
Adaptive Signal Digital Twins
Real-time digital twin of signalized intersections that re-times signals every cycle — improves throughput and user satisfaction simultaneously. Published in IEEE IoT Journal (IF 10.6).
I'm Sagar Dasgupta — a Research Engineer in the Department of Civil, Construction & Environmental Engineering at the University of Alabama. My research advances the safety, efficiency, and resilience of intelligent transportation systems — from real-time digital twins of urban traffic, to connected & automated vehicles, to AI-driven decision-making for the next generation of mobility.
I'm a Research Engineer in the Department of Civil, Construction & Environmental Engineering at the University of Alabama, with a research home at the USDOT National Center for Transportation Cybersecurity & Resiliency (TraCR). My research advances the safety, efficiency, and resilience of intelligent transportation systems through three intertwined threads: (1) real-time digital twins for adaptive traffic-signal control and vulnerable-road-user safety, (2) connected and automated vehicle (CV2X / AV) systems — including sensor fusion, AV navigation, and post-quantum-secure V2X communication, and (3) AI and data science for traffic flow analysis, work-zone safety, audio-based safety analytics, and rural-road risk assessment.
I completed my Ph.D. in Civil Engineering (Transportation) at UA in 2024 under Professor Mizanur Rahman. My dissertation, Cyber-Resilient Positioning and Navigation for Autonomous Ground Vehicles, sat at the intersection of transportation operations and CPS safety. My committee included Steven Jones (Civil), Alexander Hainen (Civil), Thejesh Bandi (Physics), and Jordan Larson (Aerospace). Before UA I earned an M.S. in Mechanical Engineering from Clemson (2017–2020) and a B.Tech. from MNNIT Allahabad (2011–2015). Between MNNIT and Clemson I spent two years as a Senior Engineer at HMCL Niloy Bangladesh doing production planning at one of South Asia's largest two-wheeler plants — that industrial grounding still shapes how I think about deployable transportation systems.
My research is supported by the National Science Foundation (CRII and CAREER awards), the USDOT National Center for TraCR, the Federal Motor Carrier Safety Administration (FMCSA), and the Alabama Transportation Institute. I am a Co-PI on seven funded transportation research projects (2025–2026) spanning resilient positioning & timing infrastructure, post-quantum V2X, EV-charging security, work-zone safety, and policy guidance for transportation cyber-physical-social systems. I serve on multiple Transportation Research Board (TRB) committees, am a member of the Institute of Navigation and the IEEE VTS Committee on Autonomous Vehicles, and Guest Editor for a 2026 Vehicles (MDPI) special issue on Data-Driven Intelligent Transportation Systems. I led the ITE Student Chapter at UA as President from 2022–2024.
I'm currently seeking a tenure-track Assistant Professor position in a Civil Engineering or Transportation Systems Engineering program, and am open to collaboration on proposals. If your group works on intelligent transportation systems, traffic operations, transportation safety, AV deployment, digital twins, or transportation cyber-physical systems — I'd love to talk.
I helped design three Alabama K–12 STEM modules with the Alabama Transportation Institute and Dr. Joni Lakin, distilling transportation research for middle- and high-school classrooms. Outside work I play the cajon, am a serious devotee of Bengali food, take photographs wherever I travel, and feel most alive in the mountains or by the sea.
From real-time digital twins of urban intersections, to safety apps for vulnerable road users, to AI-driven work-zone & rural-road safety, to cyber-resilient AV navigation — here's a map of what I work on, why, and where it's heading.
My long-term goal is to build a research program at the intersection of transportation operations and cyber-physical systems — one that closes the gap between theoretical models and deployed infrastructure. The lab I would lead at a Civil Engineering / Transportation department would advance real-time digital twins for adaptive urban networks, develop resilient sensing and control for connected and automated vehicles, and apply AI to road-safety problems that current methods fail on — work-zone safety, rural-road risk, vulnerable road users. The thread that ties these together is a commitment to systems that ship: methods proven on real hardware and real corridors, not just simulators.
Real-time digital twin of signalized intersections that re-times signals every cycle — improves throughput and user satisfaction simultaneously. Published in IEEE IoT Journal (IF 10.6).
Proactive digital-twin-driven safety application for pedestrians and cyclists at urban intersections. Real-world case study presented at TRB 2024.
Open-source connected-and-automated-mobility co-simulation testbed for transportation researchers — the kind of shared infrastructure that lets ITS labs compare apples to apples. arXiv:2507.09186.
FMCSA-funded real-world deployment of multi-sensor fusion for proactive commercial-motor-vehicle safety in work zones. Lessons-learned paper under review at TRR (2026); accepted at TRB 2026.
Infrastructure-enabled risk assessment of hazardous road conditions on rural roads during inclement weather — leading this FMCSA-funded project as Research Engineer. arXiv:2508.19444; accepted at TRB 2026.
In-cabin audio analytics framework that flags suspected human-trafficking signatures during autonomous-vehicle rides. TRB 2023 podium · 3MT Finalist.
Grid2Guide: A* + small language models for natural-language indoor navigation, plus vision-based localization with LLM-driven instructions. Two TRB 2026 presentations accepted.
Using VLMs to detect GNSS spoofing on autonomous ground vehicles. Joint work with Clemson — accepted at TRB 104th Annual Meeting (2026).
Sensor-fusion methods for detecting GNSS spoofing on autonomous ground vehicles — the dissertation thread. Published in IEEE TITS, TRR, and IEEE IoT Journal; hardware-validated at IEEE IAVVC and TraCR.
Characterization of stealthy slow-drift attacks that evade conventional defenses, with practical mitigations. TRB 103rd Annual Meeting Lectern Session — "Protecting Against Automated Road Rage."
Ground-based intelligent infrastructure for resilient Positioning, Navigation & Timing — TraCR-funded prototype development & pilot deployment, 2025–2026. Co-PI.
Hybrid framework targeting zero-day, time-push GNSS spoofing — a class of attacks that elude both classical signal-quality and learning-based detectors. Under review at IEEE IoT Journal.
AI-driven post-quantum cryptography for cyber-resilient V2X communication. TraCR-funded (Co-PI, 2025–2026); contributing to a Springer book chapter on AI for cyber-physical systems security.
Three flagship technology demonstrations I've led — to USDOT leadership, the TraCR research community, and the IEEE AV-validation community.

Team-led technology demonstration to USDOT leadership at the 2024 Future of Transportation Summit, Washington, D.C. — end-to-end resilient navigation under spoofing and denied conditions.

Team-led GNSS-based AV navigation security demonstration at TraCR 2024 in Greenville, SC — earned 2nd place in the Student Poster Competition.
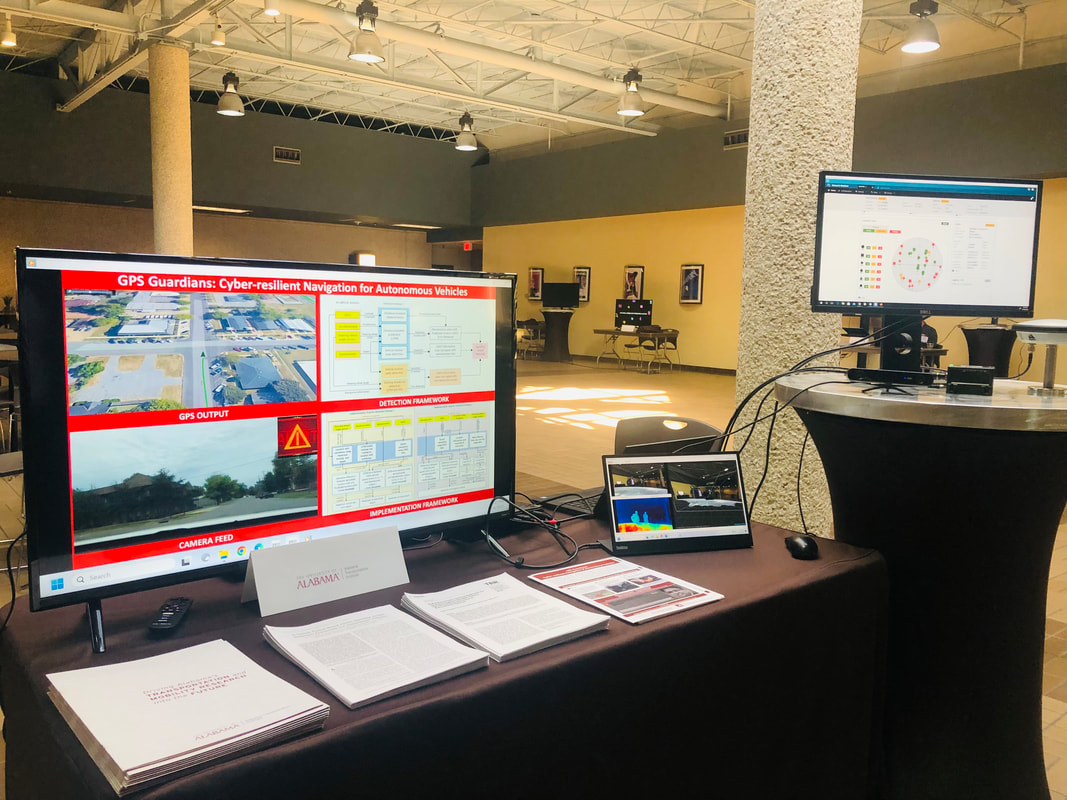
Cyber-resilient navigation tech demo at IEEE IAVVC 2023, Austin TX. Team-led.
Live digital twin that re-times signals every cycle. Published in IEEE IoT Journal (IF 10.6).

Stealthy attacks bypass classic checks. TRB 103rd Lectern Session — "Protecting Against Automated Road Rage."
Full publication list with BibTeX is on Google Scholar.
A real-time digital twin of a signalized intersection that re-times signal phases on every cycle. Combines vehicle-level data with surrogate traffic models to improve throughput AND user satisfaction simultaneously — a result that conventional signal-control optimization typically can't deliver. Validated on real-world corridor data; among the first works to demonstrate closed-loop digital-twin operation for transportation infrastructure.
Read the paper on IEEE Xplore →Plus contributing technical lead on the NSF CAREER, NSF CRII, FMCSA, and the $20M USDOT TraCR center proposal as a graduate research assistant.
Selected code released alongside the research — co-simulation testbeds, language-model navigation tools, and the GNSS spoofing detection framework.
Open-source connected-and-automated-mobility co-simulation platform for advanced transportation research. Lets ITS researchers compare apples to apples.
A* + small language models for natural-language indoor navigation. Companion code for the TRB 2026 paper.
GitHub profile — full list of public repositories, datasets, and demo code accompanying my research papers.
My teaching philosophy: pair every formal idea with a physical system the students can build, break, and measure. I've taught traffic flow theory, transportation engineering, surveying, and transportation cyber-physical systems at UA, and helped develop K–12 STEM modules with the Alabama Transportation Institute.
UA Department of Civil, Construction & Environmental Engineering — 2020–2024.
15 students across PhD, MS, and undergrad — five via NSF REU.
Whether you're a search committee, a potential collaborator, or a student curious about my work — please reach out. I respond to all serious inquiries within a few days.
Email me